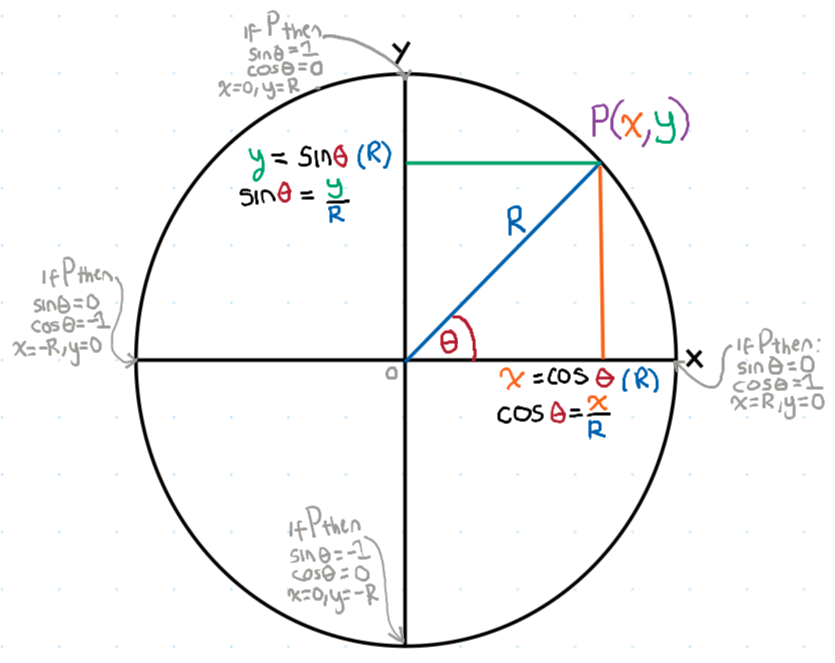
Imagine a point P moving on a circle of radius R centered at the origin of an x-y coordinate system. Let the angle θ be measured counterclockwise from the positive x-axis to the line segment connecting the origin to point P.
The coordinates of point P are given by (x, y).
Then, the cosine and sine of the angle θ are defined as the normalised coordinates of this point:
cos(θ) = x / R(The ratio of the horizontal coordinate to the radius)sin(θ) = y / R(The ratio of the vertical coordinate to the radius)
This definition is flexible:
- You can treat the Unit Circle definition as a special case: If you choose R=1, this simplifies to
cos(θ) = xandsin(θ) = y. - Because x and y are coordinates, they can be positive or negative, naturally defining sine and cosine in all four quadrants and for angles beyond 360° or negative angles.
- It supports the SOH CAH TOA definition: for
0 < θ < 90°, you can draw a right triangle withxas the adjacent side,yas the opposite side, andRas the hypotenuse. - Defining it with radius
Rmakes it applicable to physical situations where the magnitude is not 1 (e.g., the length of a link in a robot).